Introduction
技術紹介
法面でのプログラム移動(熊本大学と㈱テクノコンサルタントで共同開発)
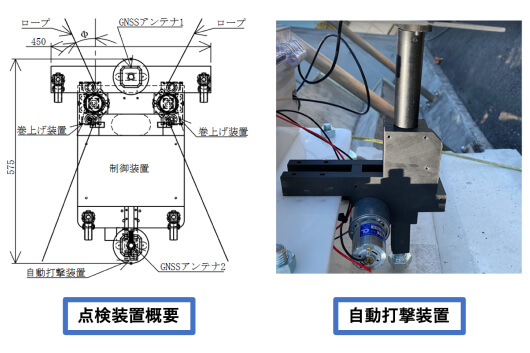
・法面移動機体・自動追尾トータルステーション・PCから構成。
・2台のロープ巻き取り機を備え、巻き取り・繰り出しを調節して、法面上の任意の位置に移動可能である。
・RTK-GNSSで法面上での機体の位置をリアルタイムで把握。
・音響センサーで打音を収録し、PC上で解析を行い、法面の空洞状況を把握する。
【課題】
プログラム走行による、調査の完全自動化を目指す
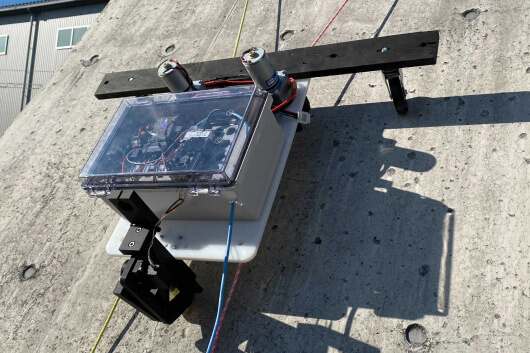
法面点検ロボット

点検状況